Differentially Private
Gaussian Processes
Presented by Mike Smith
m.t.smith@sheffield.ac.uk
Differential Privacy
A Quick Introduction
See The Algorithmic Foundations of Differential Privacy by Dwork and Roth for a rigorous introduction to the framework.
Anonymity Gone Wrong
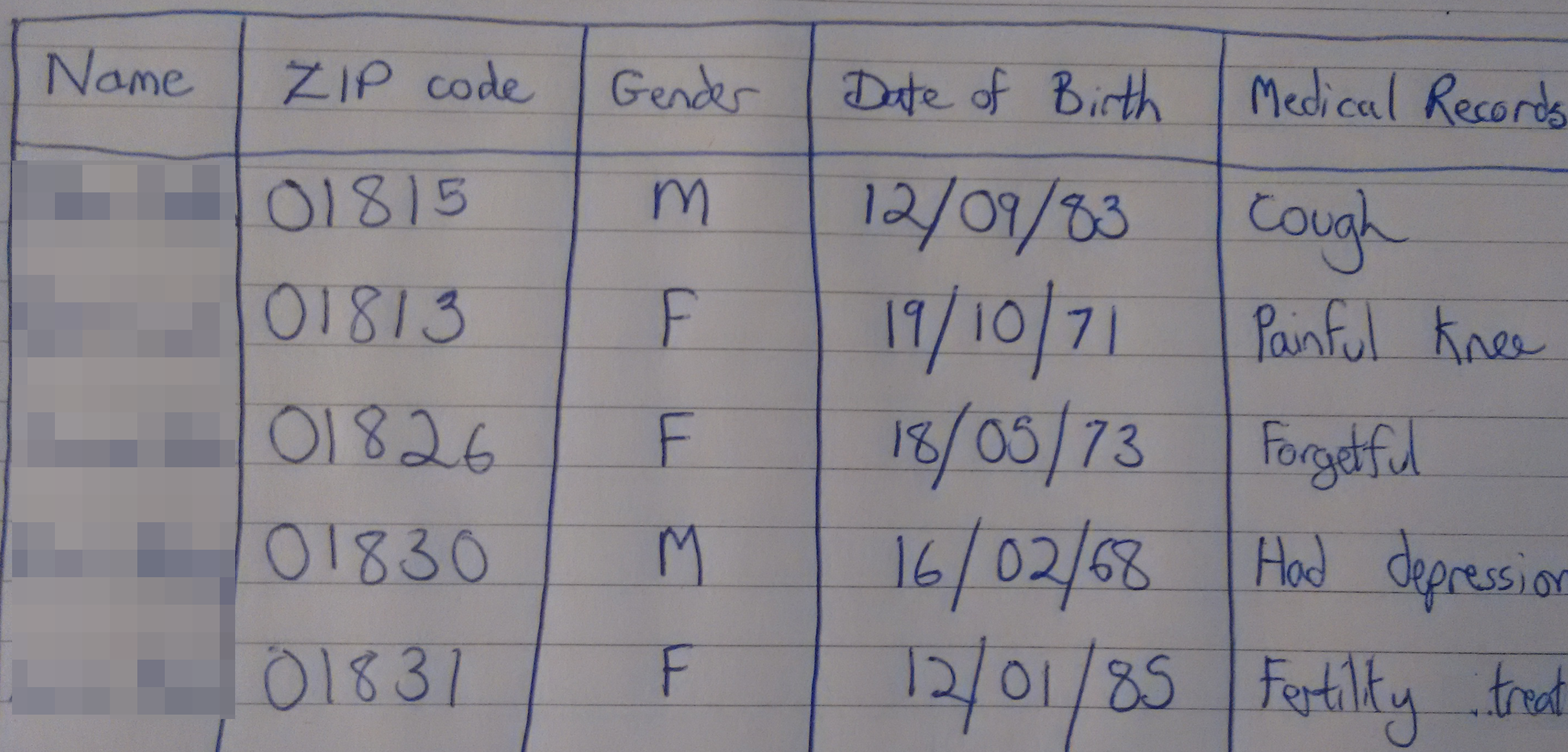
In the mid-1990s the Massachusetts Group Insurance Commission released 'anonymised' health records for state employees.

Anonymity Gone Wrong
 The Governor assured the public that GIC had protected patient privacy by deleting identifiers.
The Governor assured the public that GIC had protected patient privacy by deleting identifiers.
Broken Promises of Privacy, Paul Ohm
Anonymity Gone Wrong
The data was 'anonymised' by removing names. Other identifying columns remained.
Anonymity Gone Wrong
 Latanya Sweeney used the voter rolls to find the Governor's medical records...
Latanya Sweeney used the voter rolls to find the Governor's medical records...
...which she posted to him.
This is a linkage attack: it uses auxiliary information to compromise privacy in a database.
Example
We might want to find out whether people hold a controversial view, that they wouldn't normally express:
The trams were actually a good idea
Many people in this room might secretly agree, but maybe wouldn't like to say 'Yes' to this question.
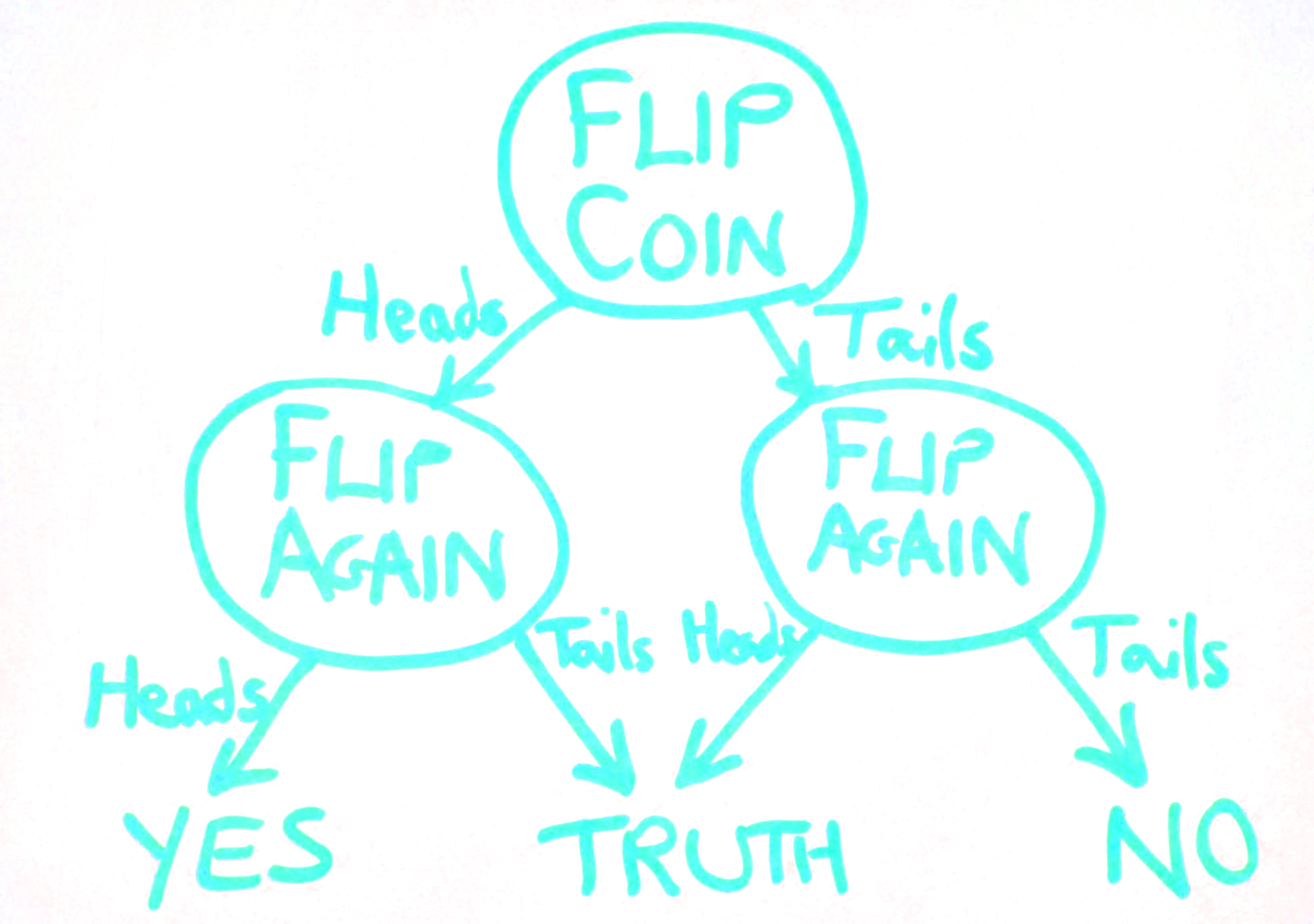 If flips are different, tell the truth.
If flips are different, tell the truth. If they're the same...
say
YES for heads
and
NO for tails
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 50 | 38 | 27 | 19 | 13 | 9 | 6 | 4 | 3 | 2 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 63 | 50 | 38 | 28 | 20 | 14 | 10 | 7 | 4 | 3 | 2 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 73 | 62 | 50 | 39 | 29 | 21 | 15 | 11 | 7 | 5 | 3 | 2 | 2 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 3 | 81 | 72 | 62 | 50 | 40 | 30 | 22 | 16 | 11 | 8 | 6 | 4 | 3 | 2 | 1 | 1 | 1 | 0 | 0 | 0 |
| 4 | 87 | 80 | 72 | 61 | 50 | 40 | 31 | 23 | 17 | 12 | 9 | 6 | 4 | 3 | 2 | 1 | 1 | 1 | 0 | 0 |
| 5 | 91 | 86 | 79 | 71 | 61 | 51 | 41 | 32 | 24 | 18 | 13 | 10 | 7 | 5 | 3 | 2 | 2 | 1 | 1 | 1 |
| 6 | 94 | 91 | 85 | 79 | 70 | 61 | 51 | 41 | 32 | 25 | 19 | 14 | 10 | 8 | 5 | 4 | 3 | 2 | 1 | 1 |
| 7 | 96 | 94 | 90 | 85 | 78 | 69 | 60 | 51 | 42 | 33 | 26 | 20 | 15 | 11 | 8 | 6 | 4 | 3 | 2 | 2 |
| 8 | 97 | 96 | 93 | 89 | 84 | 77 | 69 | 60 | 51 | 42 | 34 | 27 | 21 | 16 | 12 | 9 | 7 | 5 | 3 | 3 |
| 9 | 98 | 97 | 95 | 92 | 88 | 83 | 76 | 68 | 60 | 51 | 42 | 35 | 28 | 22 | 17 | 13 | 10 | 7 | 5 | 4 |
| 10 | 99 | 98 | 97 | 95 | 92 | 87 | 82 | 75 | 68 | 59 | 51 | 43 | 35 | 28 | 23 | 18 | 14 | 10 | 8 | 6 |
| 11 | 99 | 99 | 98 | 96 | 94 | 91 | 87 | 81 | 75 | 67 | 59 | 51 | 43 | 36 | 29 | 23 | 18 | 14 | 11 | 8 |
| 12 | 99 | 99 | 98 | 97 | 96 | 94 | 90 | 86 | 80 | 74 | 67 | 59 | 51 | 43 | 36 | 30 | 24 | 19 | 15 | 12 |
| 13 | 100 | 99 | 99 | 98 | 97 | 95 | 93 | 90 | 85 | 80 | 73 | 66 | 59 | 51 | 44 | 37 | 30 | 25 | 20 | 16 |
| 14 | 100 | 100 | 99 | 99 | 98 | 97 | 95 | 92 | 89 | 84 | 79 | 73 | 66 | 58 | 51 | 44 | 37 | 31 | 25 | 21 |
| 15 | 100 | 100 | 100 | 99 | 99 | 98 | 96 | 94 | 92 | 88 | 84 | 78 | 72 | 65 | 58 | 51 | 44 | 38 | 32 | 26 |
| 16 | 100 | 100 | 100 | 99 | 99 | 98 | 97 | 96 | 94 | 91 | 87 | 83 | 78 | 71 | 65 | 58 | 51 | 44 | 38 | 32 |
| 17 | 100 | 100 | 100 | 100 | 99 | 99 | 98 | 97 | 96 | 93 | 91 | 87 | 82 | 77 | 71 | 65 | 58 | 51 | 45 | 38 |
| 18 | 100 | 100 | 100 | 100 | 100 | 99 | 99 | 98 | 97 | 95 | 93 | 90 | 86 | 82 | 76 | 71 | 64 | 58 | 51 | 45 |
| 19 | 100 | 100 | 100 | 100 | 100 | 99 | 99 | 99 | 98 | 97 | 95 | 92 | 89 | 86 | 81 | 76 | 70 | 64 | 58 | 51 |
Summary
We want to protect a user from a linkage attack...
...while still performing inference over the whole group.
Making a dataset private needs more than just erasing names.
To achieve a level of privacy one needs to add randomness to the data.
This is a fundamental feature of differential privacy.
Differential Privacy for GPs
Differential Privacy for GPs
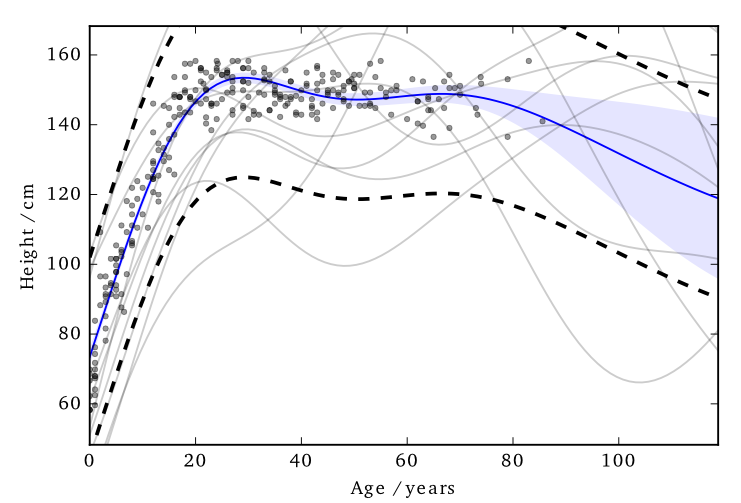
We have a dataset in which the inputs, $X$, are public. The outputs, $\mathbf{y}$, we want to keep private.
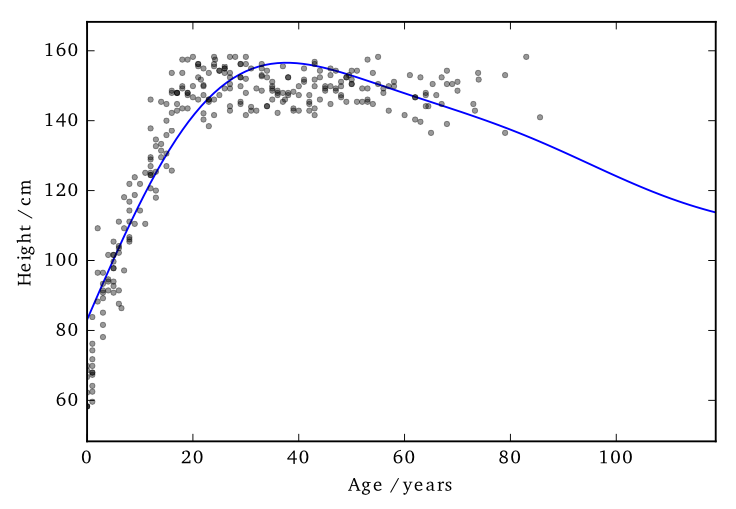
Data consists of the heights and weights of 287 women from a census of the !Kung
Vectors and Functions
Hall et al. (2013) showed that one can ensure that a version of $f$, function $\tilde{f}$ is $(\varepsilon, \delta)$-differentially private by adding a scaled sample from a GP prior.
Applied to GPs
We applied this method to the GP posterior.
The covariance of the posterior only depends on the inputs, $X$. So we can compute this without applying DP.
The mean function, $f_D(\mathbf{x_*})$, does depend on $\mathbf{y}$. $f_D(\mathbf{x_*}) = \mathbf{k}_*^\top K^{-1} \mathbf{y}$
We are interested in finding $|| f_D(\mathbf{x_*}) - f_{D^\prime}(\mathbf{x_*}) ||_H^2$
...how much the mean function (in RKHS) can change due to a change in $\mathbf{y}$.
Applied to GPs
Using the representer theorem, we can write $|| f_D(\mathbf{x_*}) - f_{D^\prime}(\mathbf{x_*}) ||_H^2$
as:
$\Big|\Big|\sum_{i=1}^n k(\mathbf{x_*},\mathbf{x}_i) \left(\alpha_i - \alpha^\prime_i\right)\Big|\Big|_H^2$
where $\mathbf{\alpha} - \mathbf{\alpha}^\prime = K^{-1} \left(\mathbf{y} - \mathbf{y}^\prime \right)$
$\Big|\Big|\sum_{i=1}^n k(\mathbf{x_*},\mathbf{x}_i) \left(\alpha_i - \alpha^\prime_i\right)\Big|\Big|_H^2$
where $\mathbf{\alpha} - \mathbf{\alpha}^\prime = K^{-1} \left(\mathbf{y} - \mathbf{y}^\prime \right)$
We constrain the kernel: $-1\leq k \leq 1$ and we only allow one element of $\mathbf{y}$ and $\mathbf{y}'$ to differ (by at most $d$).
So only one column of $K^{-1}$ will be involved in the change of mean (which we are summing over).
The distance above can then be shown to be no greater than $d\;||K^{-1}||_\infty$
Applied to GPs
This 'works' in that it allows DP predictions...
But to avoid too much noise, the value of $\varepsilon$ is too large (here it is 100!)
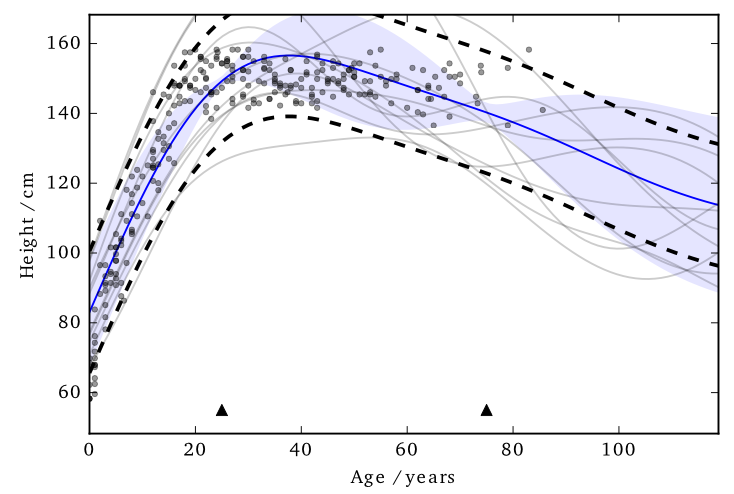
Inducing Inputs
Using sparse methods (i.e. inducing inputs) can help reduce the sensitivity a little.
Effect of perturbation
Previously I mentioned that the noise is sampled from the GP's prior.
This is not necessarily the most 'efficient' covariance to use.
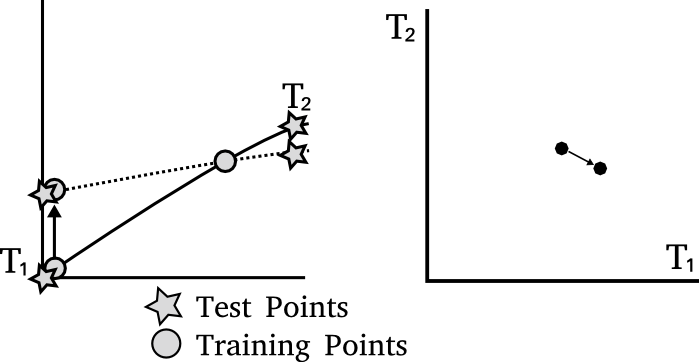
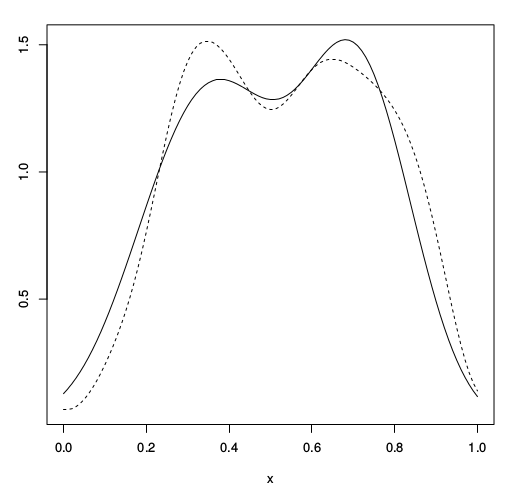
Effect of perturbation
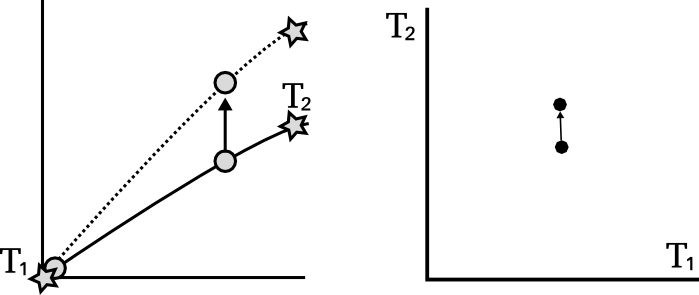
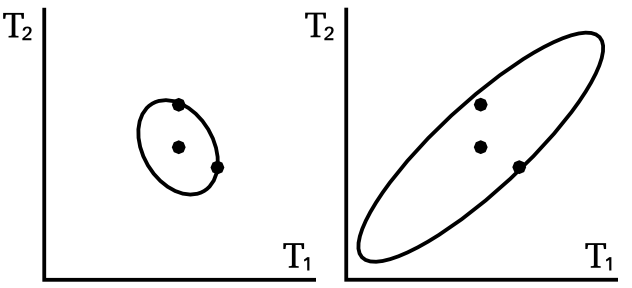
Cloaking
Left: Ideal covariance. Right: actual covariance
Cloaking
Hall et al. (2013) also presented a bound on vectors.
We need to find a bound ($\Delta$) on the scale of the output change, in term of its Mahalanobis distance with respect to the added noise covariance.
$\sup_{D \sim {D'}} ||M^{-1/2} (\mathbf{y}_D - \mathbf{y}_{D'})||_2 \leq \Delta$
Then use this to add noise to our vector $\mathbf{v}_D$:
$\tilde{\mathbf{v}_D} = \mathbf{v}_D + \frac{\text{c}(\delta)\Delta}{\varepsilon}Z$
Cloaking
Intuitively we want to construct M so that it has greatest covariance in those directions most affected by changes in training points, so that it will be most able to mask those changes.
The posterior mean predictions are,
$\mathbf{y}_* = K_{*f} K^{-1} \mathbf{y}$
The effect of perturbing each training point on each test point is represented in the cloaking matrix, $C = K_{*f} K^{-1}$
Cloaking
We assume we only need protect the change in one training input at a time.
...introduce y-y' earlier
sub into bound
optimisation
Example: House prices
Example: citibike
Also need to do intro re uganda
The go-to book on differential privacy, by Dwork and Roth;
Dwork, Cynthia, and Aaron Roth. "The algorithmic foundations of differential privacy." Theoretical Computer Science 9.3-4 (2013): 211-407.
link
I found this paper allowed me to start applying DP to GP;
Hall, Rob, Alessandro Rinaldo, and Larry Wasserman. "Differential privacy for functions and functional data." The Journal of Machine Learning Research 14.1 (2013): 703-727.
link
Articles about the Massachusetts privacy debate
Barth-Jones, Daniel C. "The're-identification'of Governor William Weld's medical information: a critical re-examination of health data identification risks and privacy protections, then and now." Then and Now (June 4, 2012) (2012). link
Ohm, Paul. "Broken promises of privacy: Responding to the surprising failure of anonymization." UCLA Law Review 57 (2010): 1701. link
Narayanan, Arvind, and Edward W. Felten. "No silver bullet: De-identification still doesn’t work." White Paper (2014). link
Howell, N. Data from a partial census of the !kung san, dobe. 1967-1969. https://public.tableau. com/profile/john.marriott#!/vizhome/ kung-san/Attributes, 1967.
Images used: BostonGlobe: Mass Mutual, Weld. Harvard: Sweeney. Rich on flickr: Sheffield skyline.
{kind=link}
{kind=link}
{kind=link}